光线与表面求交¶
光线追踪 涉及大量 Ray-Surface Intersection 计算。
Equations¶
| Type | Equation |
|---|---|
| Ray | \(\mathbf{r}(t)=\mathbf{o}+t\mathbf{d},0 \le t < \infty\) |
| Sphere | \(\mathbf{p}:(\mathbf{p}-\mathbf{c})^2-R^2=0\) |
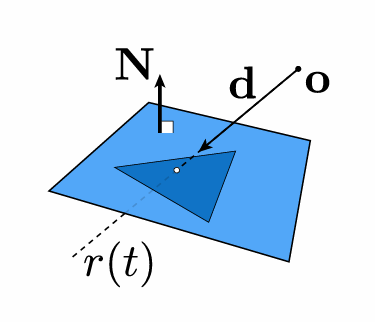
| Plane | \(\mathbf{p}:(\mathbf{p}-\mathbf{p}') \cdot \mathbf{N}=0\) |
| General implicit surface | \(\mathbf{p}:f(\mathbf{p})=0\) |
联立就能算出交点。
对于射线(Ray),计算后要检查参数 \(t\) 的范围。对于封闭的曲面,如果 Ray 和它交于两点且 \(t_1<0,t_2>0\),则说明 Ray 的起点在曲面内部。
Ray Intersection With Triangle¶
因为 Triangle Mesh 比较常用,所以考虑 Ray 和 Triangle 的相交计算,可以分两步
- 计算 Ray 与 Triangle 所在 Plane 的交点
- 判断交点是否在 Triangle 内部,可以用 重心坐标
Möller Trumbore Algorithm¶
这个算法比前面的更快,可以一步到位。将 Ray 和三角形重心坐标式联立
其中 \(\mathbf{P_0},\mathbf{P_1},\mathbf{P_2}\) 是三角形顶点。式中的向量都是三维的,变量也只有 \(t,b_1,b_2\) 三个,所以它是一个线性方程组
用 Cramer's rule 和 行列式性质(向量混合积) 求解
其中
Cost = 1 div, 27 mul, 17 add.
Bounding Volumes¶
直接用 Ray 和场景中所有 Triangle 做测试太慢了,所以用简单的形状把物体包起来
- 物体必须被完全包含在包围盒中
- 如果 Ray 不与包围盒相交,一定也不与物体相交
- 先检测包围盒,再检测里面的物体

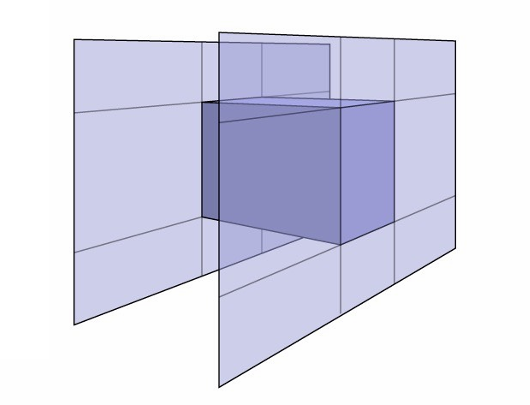
Axis-Aligned Bounding Box¶
AABB 由三组轴对齐的平行面(slab)构成。轴对齐可以减少计算量。
以 2D 为例,计算交点时,先计算 Ray 与三组平行面的交点,然后取最大的 \(t_{\text{min}}\) 和最小的 \(t_{\text{max}}\),换句话说,就是取下图中红色部分的交集。
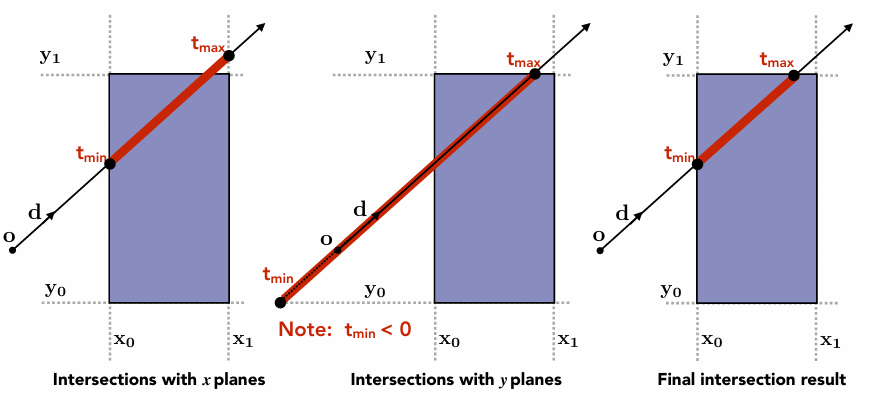
- The ray enters the box only when it enters all pairs of slabs
- The ray exits the box as long as it exits any pair of slabs
For the 3D box
| 条件 | 解释 | 相交 |
|---|---|---|
| \(t_{\text{enter}} < t_{\text{exit}}\) | Ray 在 Box 中待了一会才出去 | Yes |
| \(t_{\text{exit}}<0\) | Box 在 Ray 后面 | No |
| \(t_{\text{exit}} \ge 0\) 且 \(t_{\text{enter}}<0\) | Ray 的起始位置在 Box 内 | Yes |
所以,Ray 与 AABB 相交的条件是 \(t_{\text{enter}}<t_{\text{exit}}\) 且 \(t_{\text{exit}} \ge 0\)。
Acceleration¶
Using AABBs to accelerate ray tracing.
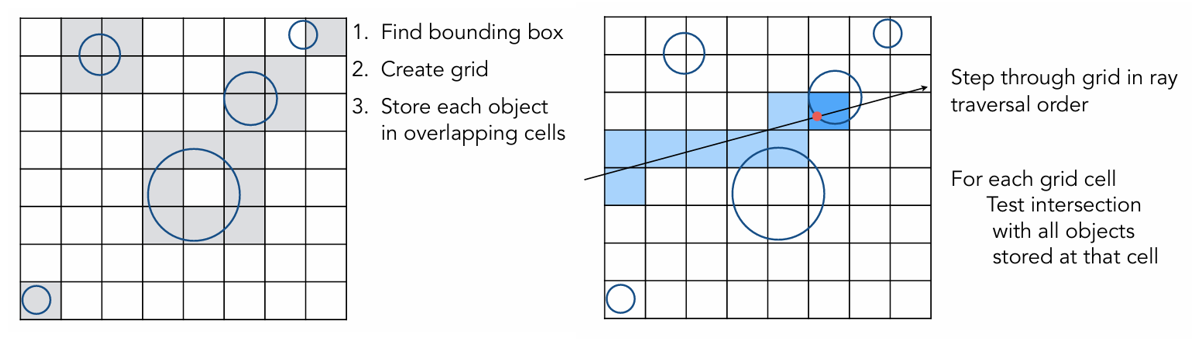
Uniform Spatial Partitions (Grids)¶
- 划分格子数太少,没有加速效果
- 划分格子数太多,计算量太大
一种启发式的方式
在 3D 场景 \(C \approx 27\)。

Grids work well on large collections of objects that are distributed evenly in size and space.

上图这个场景非常空,就中间有几个茶壶,大多数 Grid 都是空的,无效计算多,效果差,会出现 "Teapot in a stadium" 问题。
Spatial Partitions¶
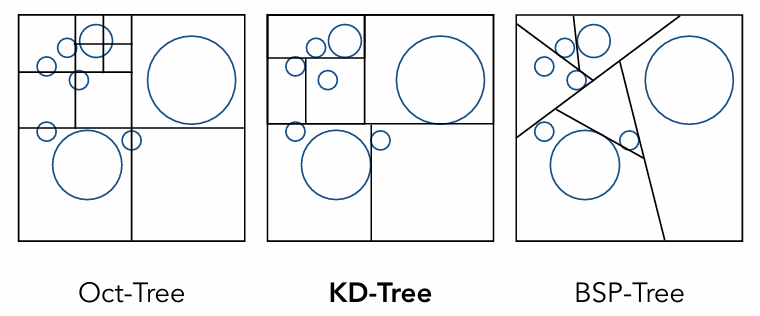
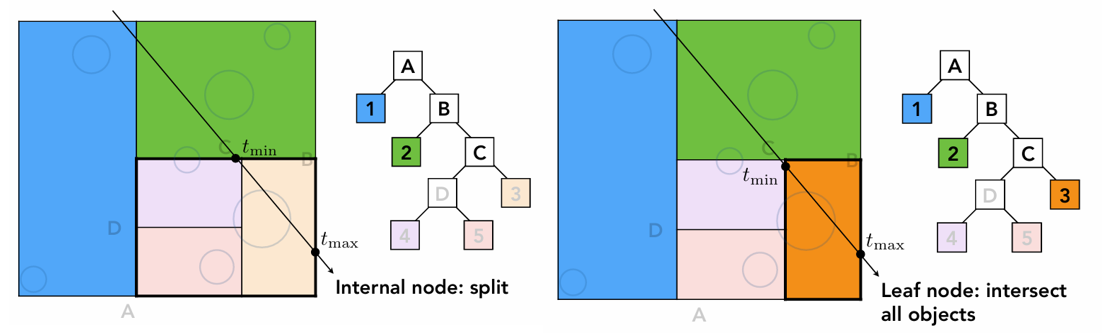
以 KD-Tree 为例,为了尽可能均匀划分,它总是 X-Y-Z 方向交替划分。下图中就是横竖交替划分。
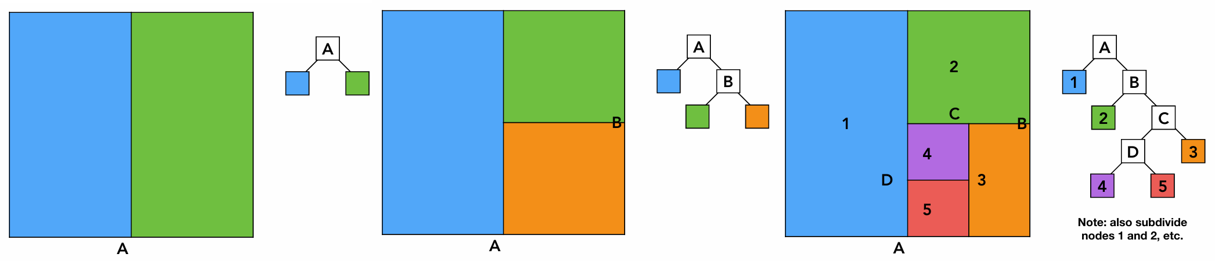
Internal nodes store
- split axis: x-, y-, or z-axis
- split position: coordinate of split plane along axis
- children: pointers to child nodes
- No objects are stored in internal nodes
Leaf nodes store
- list of objects
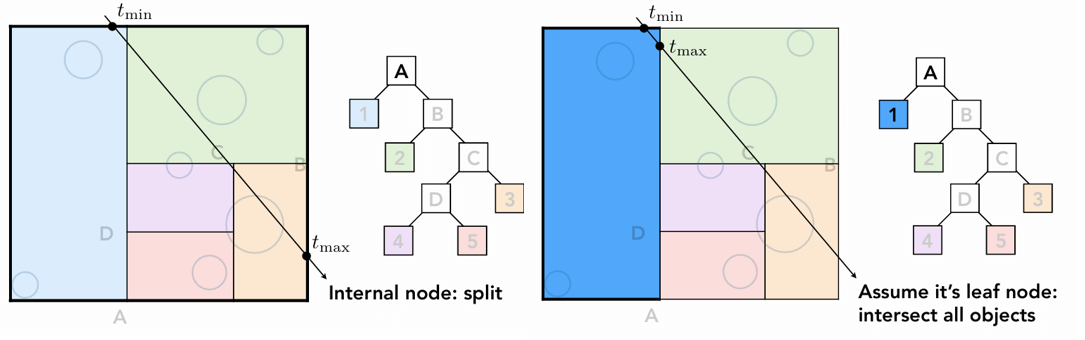
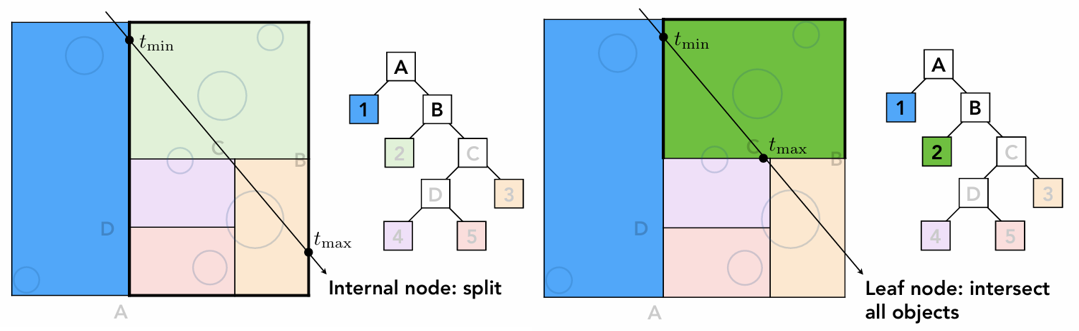
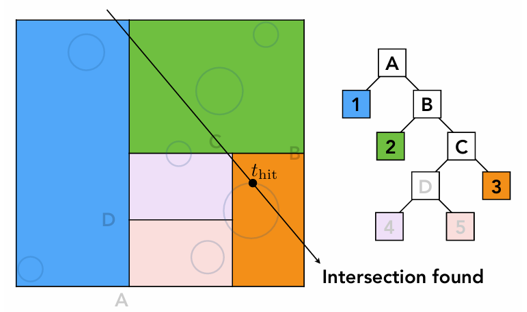
KD-Tree 遍历
Object Partitions¶
通常采用 Bounding Volume Hierarchy (BVH)。
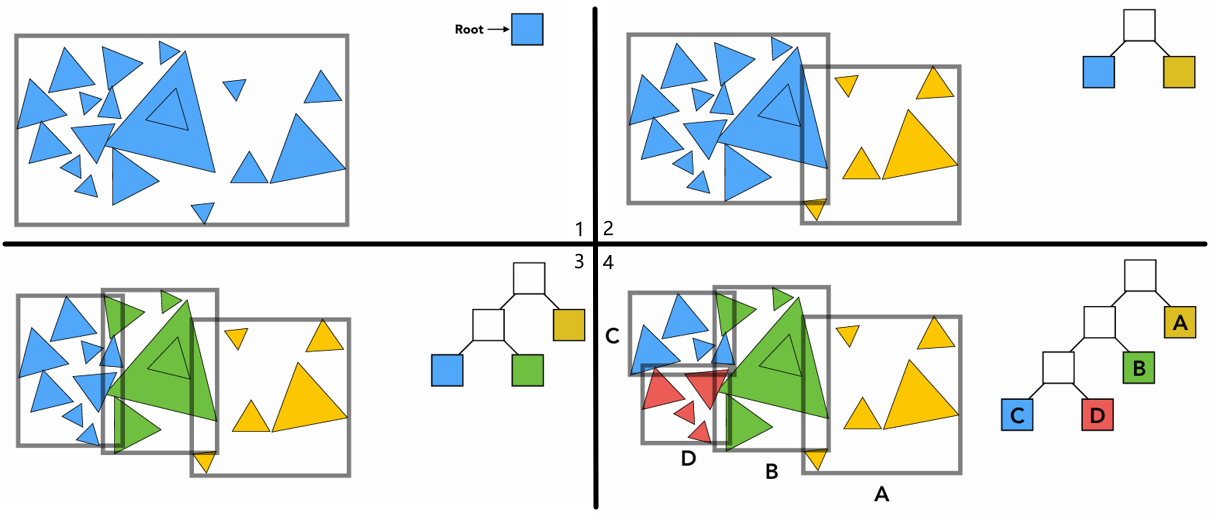
BVH 构建流程
- Find bounding box
- Recursively split set of objects in two subsets
- Recompute the bounding box of the subsets
- Stop when necessary
- Store objects in each leaf node
- How to subdivide a node?
- Choose a dimension to split
- Heuristic 1: Always choose the longest axis in node
- Heuristic 2: Split node at location of median object
- Termination criteria?
- Heuristic: stop when node contains few elements
- Internal nodes store
- Bounding box
- Children: pointers to child nodes
- Leaf nodes store
- Bounding box
- List of objects
- Nodes represent subset of primitives in scene
- All objects in subtree
BVH 遍历
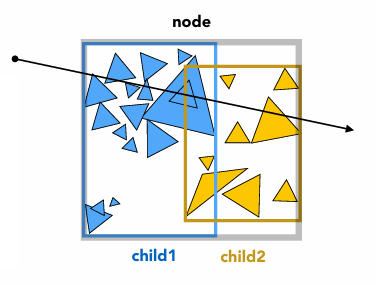
Intersect(Ray ray, BVH node)
if (ray misses node.bbox) return;
if (node is a leaf node)
test intersection with all objs;
return closest intersection;
hit1 = Intersect(ray, node.child1);
hit2 = Intersect(ray, node.child2);
return the closer of hit1, hit2;
Spatial vs. Object Partitions¶
Spatial partition (e.g.KD-tree)
- Partition space into non-overlapping regions
- An object can be contained in multiple regions
Object partition (e.g. BVH)
- Partition set of objects into disjoint subsets
- Bounding boxes for each set may overlap in space
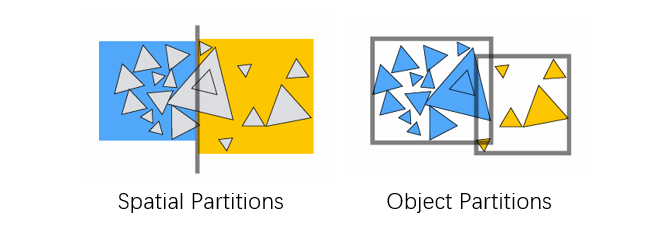
Spatial partition 在划分空间后,要判断哪些物体在空间中 ,而 BVH 只要重新算包围盒就好了,所以现在 BVH 使用得相对更多。