视觉期末整理¶
色彩¶
采样定理¶
若采样率 \(\ge\) 信号最大频率的 2 倍,或每周期两个样本,信号才能复原,该最小采样率称为奈奎斯特频率。
若采样率不够高,信号会发生混叠。
插值¶
- 最近邻插值:Point
- 双线性插值:Bilinear
- 双三次插值:Bicubic,使用一个三次多项式 \(S(x)\) 加权周围 16 个灰度值得到
- 前向映射:原图像的点变换到新图像,然后按权重分配给周围像素
- 后向映射:新图像的点变换回原图像,然后插值周围的点
图像和滤波¶
- 图像基本运算
- 点运算:对一幅图像中每个像素点的灰度值进行计算的方法
- 灰度变换增强:线性、分段线性、非线性灰度变换
- 直方图增强
- 几何运算:对图像做几何变换
- 点运算:对一幅图像中每个像素点的灰度值进行计算的方法
-
线性滤波:用相邻像素的线性组合(加权和)代替原像素
-
互相关(Cross Correlation):
\[ G(i,j)=H \otimes F = \displaystyle\sum_{u=-k}^{k}\displaystyle\sum_{v=-k}^{k} H(u,v)F(i+u,j+v) \] -
卷积(Convolution):
\[ G(i,j)=H * F = \displaystyle\sum_{u=-k}^{k}\displaystyle\sum_{v=-k}^{k} H(u,v)F(i-u,j-v) \]
-
-
核的大小为 \((2k+1) \times (2k+1)\),将相关权重核旋转 180 度(水平、垂直翻转)得到卷积核
高斯滤波¶
利用高斯滤波函数对图像进行卷积,其中高斯函数为
利用高斯滤波函数对图像进行多次滤波,可获得多尺度滤波图像。
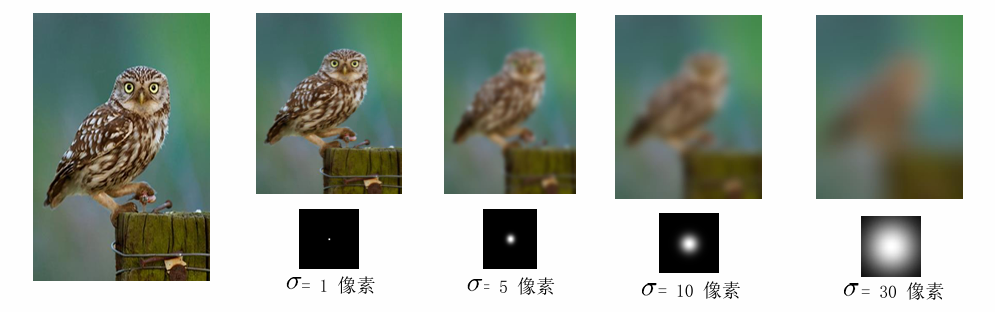
高斯滤波是低通滤波,利随着 \(\sigma\) 增大,图像的细节(高频部分)逐渐被滤除,图像的尺度依次变大。以 \(\sigma\) 卷积两次相当于以 \(\sqrt{2} \sigma\) 卷积一次。
锐化¶
原图减低频信息得到高频细节,原图再加上高频细节得到锐化结果。
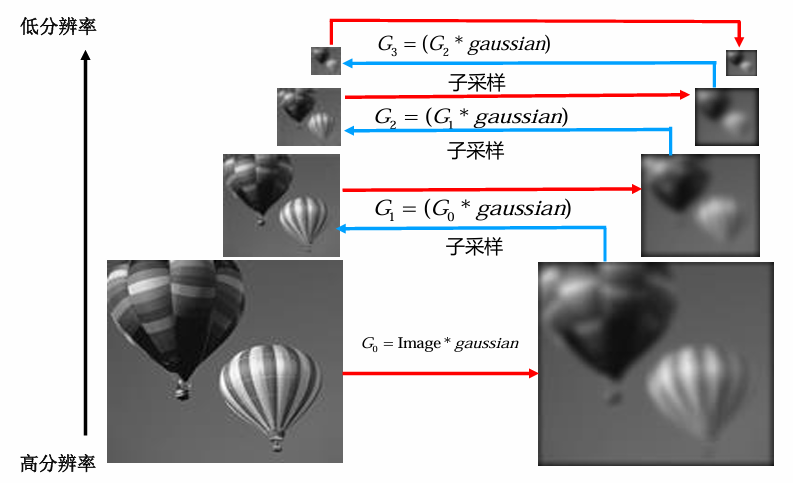
高斯金字塔¶
从原图开始,先做高斯滤波,再下采样到一半大小,不断重复,可以构建高斯金字塔。为了避免信号混叠,所以先高斯滤波,降低图像频率,再下采样。
拉普拉斯金字塔¶
Canny 边缘检测¶
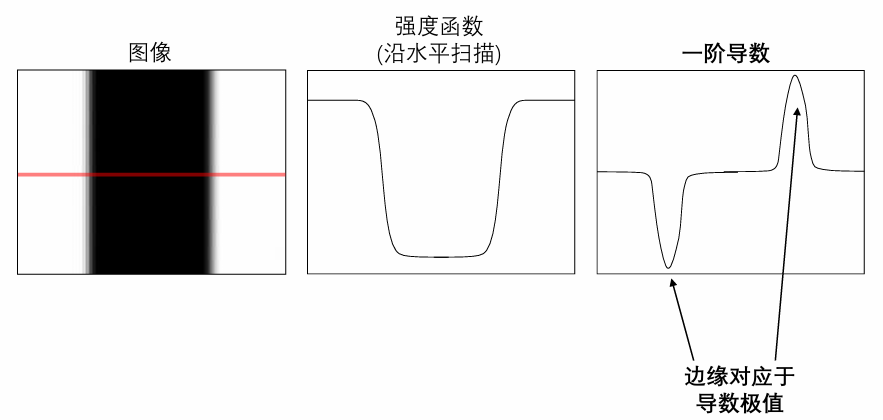
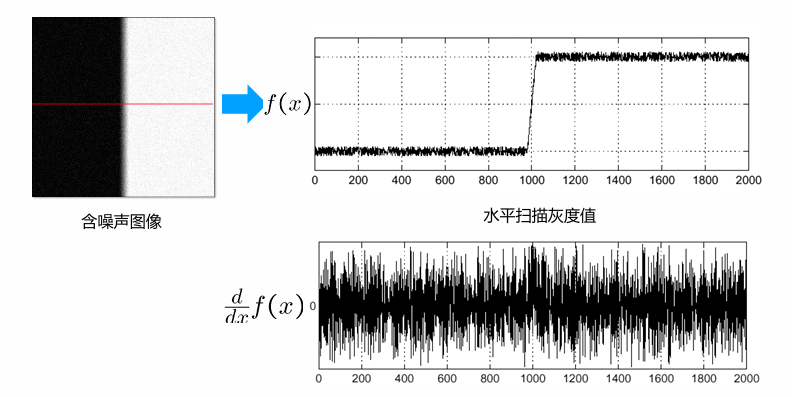
边缘对应图像导数的极值,但求导前应该先滤掉噪声(高斯滤波)。
两步合成一步,使用高斯导数做滤波,Sobel 算子是高斯导数的近似
-
检测垂直边缘:
\[ S_x=\frac{1}{8}\begin{bmatrix} -1,&0,&1\\ -2,&0,&2\\ -1,&0,&1 \end{bmatrix} \] -
检测水平边缘:
\[ S_y=\frac{1}{8}\begin{bmatrix} 1,&2,&1\\ 0,&0,&0\\ -1,&-2,&-1 \end{bmatrix} \]
Sobel 算子的标准定义省略了 \(\dfrac{1}{8}\) 项,不会对边缘检测产生影响,如果要得到正确的梯度幅值,\(\dfrac{1}{8}\) 项是必须的。
之前的滤波导致边缘模糊,所以沿梯度的方向抑制非极大值。然后设两个阈值 \(t<T\),有如下三种情况:
- \(R>T\): 强边缘
- \(t<R<T\): 弱边缘
- \(R<t\): 非边缘
强边缘是边缘,弱边缘仅在与强边缘连接时才是边缘。
总结
- 用高斯导数做滤波,获得梯度的幅值与方向
- 沿梯度方向进行非极大值抑制
- 连接与滞后阈值化:定义两个阈值,使用高阈值寻找边缘曲线的起点,用低阈值确定后继点
Harris 角点检测¶
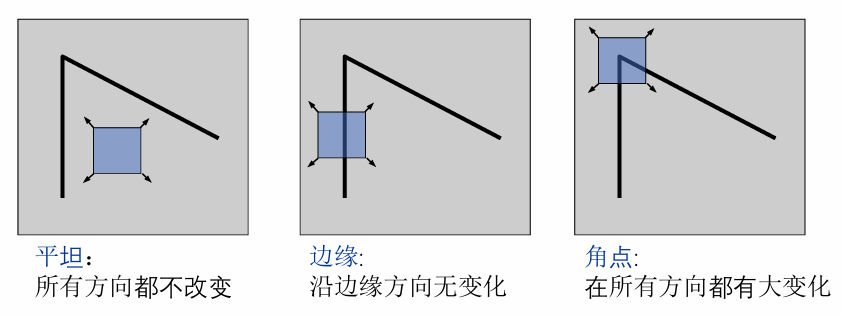
角点特征:高曲率边界点、线交叉点、高显著性点,主要用于图像的特征匹配、特征追踪、机器人导航等领域。
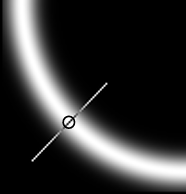
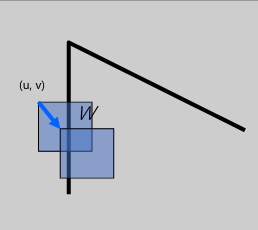
检查一个窗口内像素的变化,来寻找特征。
将窗口 \(W\) 平移 \((u,v)\),比较平移前后窗口 \(W\) 内每个像素的差异平方和(SSD)
考虑 \(I(x+u,y+v) \approx I(x,y) + uI_x + vI_y\) (\(I_x,I_y\) 是图像对 \(x,y\) 的偏导),所以
其中
记
实际应用中,直接计算图像的导数,容易受噪声的影响,所以我们通常会根据每个点到中心像素的距离对导数进行加权,例如使用高斯函数
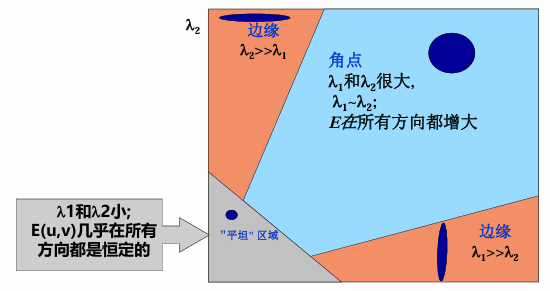
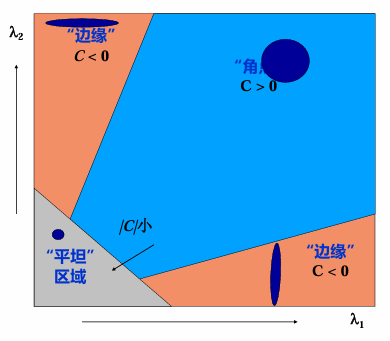
求出两个特征值和特征向量
分别对应增幅最快和最慢的两个方向,以及对应的变化幅度。
为了减少计算,使用另一个公式来判断
其中 \(\alpha\) 是个经验常数。
具体流程
- 计算图像中每个点的梯度
- 计算每个点的 \(\begin{bmatrix}I_x^2 &I_xI_y\\I_xI_y &I_y^2\end{bmatrix}\),然后进行窗口大小的高斯滤波得到 \(H\)
- 计算 \(C =\det(H) - \alpha \cdot \mathrm{tr}(H)^2\)
- 查找具有较大响应 \(C > \text{threshold}\) 且是局部最大值的点
Harris 角点特征
- 平移不变性
- 旋转不变性
- 亮度变化不变性
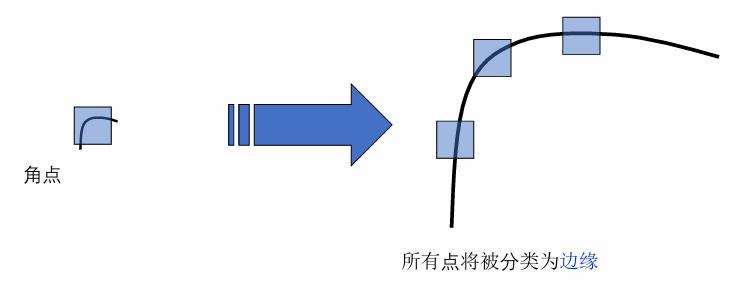
- 不具有缩放不变性
尺度不变特征变换¶
尺度不变特征变换(Scale Invariant Feature Transform,SIFT)
- 特征稳定。具有平移、旋转、尺度不变性,并且可以在一定程度上避免 遮挡和噪声等干扰
线性最小二乘法¶
对于超定(over-determined)非齐次线性方程组 \(\mathbf{A} \mathbf{x}=\mathbf{b}\),需要找到 \(\mathbf{x}\) 使得 \(\|\mathbf{A} \mathbf{x}-\mathbf{b}\|^2\) 最小,解法是
所以
对于超定齐次线性方程组 \(\mathbf{A} \mathbf{x}=0\),希望最小化 \(\|\mathbf{A} \mathbf{x}\|^2\) 同时 \(\mathbf{x} \ne 0\),可以对 \(\mathbf{A}\) 做 SVD
其中 \(\mathbf{U}\) 是酉矩阵,所以上式相当于 \(\mathbf{\Sigma}\mathbf{V}^T \mathbf{x} = 0\)。令 \(\mathbf{y}=\mathbf{V}^T \mathbf{x}\),得到
已知奇异值 \(\sigma_1 \ge \sigma_2 \ge \cdots \ge \sigma_n \ge 0\),所以 \(\mathbf{y}=(0,0,\cdots,y_n)^T\) 时,\(\| \mathbf{\Sigma} \mathbf{y} \|^2\) 最小。
把系数 \(y_n\) 除掉后也同样是原方程的解。所以 \(\mathbf{A} \mathbf{x}=0\) 的最小二乘解是 \(\mathbf{A}\) SVD 后 \(\mathbf{V}\) 矩阵的最后一列向量(\(\mathbf{V}^T\) 的最后一行向量)。
非线性最小二乘法¶
对于单应映射(使用齐次坐标)
实际上
是非线性的,转化为线性方程
记 \(\mathbf{p}_i=(x_i,y_i,1)^T\),写成矩阵形式
推广
第一个矩阵记为 \(\mathbf{A}\) 是 \(2n \times 9\) 大小的,第二个矩阵记为 \(\mathbf{h}\) 是 \(9 \times 1\) 大小的。
图像配准¶
最小二乘¶
- 特征提取
- 特征匹配
- 使用匹配集计算 A 到 B 单应映射的最小二乘解
RANSAC¶
随机抽样一致算法(RANdom SAmple Consensus)。
- 特征提取
- 特征匹配
- 随机抽几个匹配后的样本,计算 A 到 B 单应映射的最小二乘解
- 利用刚才的解变换 A 到 B',找到 B 和 B‘ 差距小于某个阈值的所有特征,这组特征称为内点(inliers)
- 重复抽样几次,选择长度最大的 inliers
- 利用 inliers 计算 A 到 B 单应映射的最小二乘解