球谐函数¶
球谐函数是拉普拉斯方程在球坐标下,角度部分的解,常用于保存低频的数据,例如环境光漫反射。
求解¶
球坐标系下的 拉普拉斯方程
先分离 \(f\) 中的变量,令
再代回方程得到
整理一下得到
注意到,等式左边只和 \(r\) 有关,等式右边只和 \(\theta,\varphi\) 有关,只有两边同时等于一个常数时,等式才能成立。通常,令这个常数等于 \(l(l+1)\),于是
可以被拆成两个方程,这里只考虑和角度有关的 \(Y\left(\theta,\varphi\right)\)
再用一次前面的套路,进一步分离变量,令
代入方程得到
整理一下得到
注意到,等式左边只和 \(\theta\) 有关,等式右边只和 \(\varphi\) 有关,只有两边同时等于一个常数时,等式才能成立。通常,令这个常数等于 \(m^2\),于是又变成了两个方程
第一个方程是 齐次线性微分方程,可以用特征方程求解。第二个方程,令 \(x=\cos\theta\) 可以转化为 \(l\) 次连带勒让德方程
最后,把解出来的 \(\Phi\) 和 \(\Theta\) 乘起来,就得到完整的解了,具体的公式不写了
其中,\(l\) 被称为 band,从 \(0\) 开始。每个 band 有 \(2l+1\) 个函数。前 \(n\) 个 band 有 \(n^2\) 个函数。不过,现在 \(Y_{l}^{m}(\theta,\varphi)\) 中还包含不确定的积分常数,我们可以人为给定一个归一化条件,解出常数的值
上式是在整个球面上做立体角积分,表示 \(Y_{l}^{m}(\theta,\varphi)\) 自己和自己的点乘等于 \(1\),即模长的平方为 \(1\)。注意 \(Y_{l}^{m}(\theta,\varphi)\) 是一个复函数,点乘需要共轭。
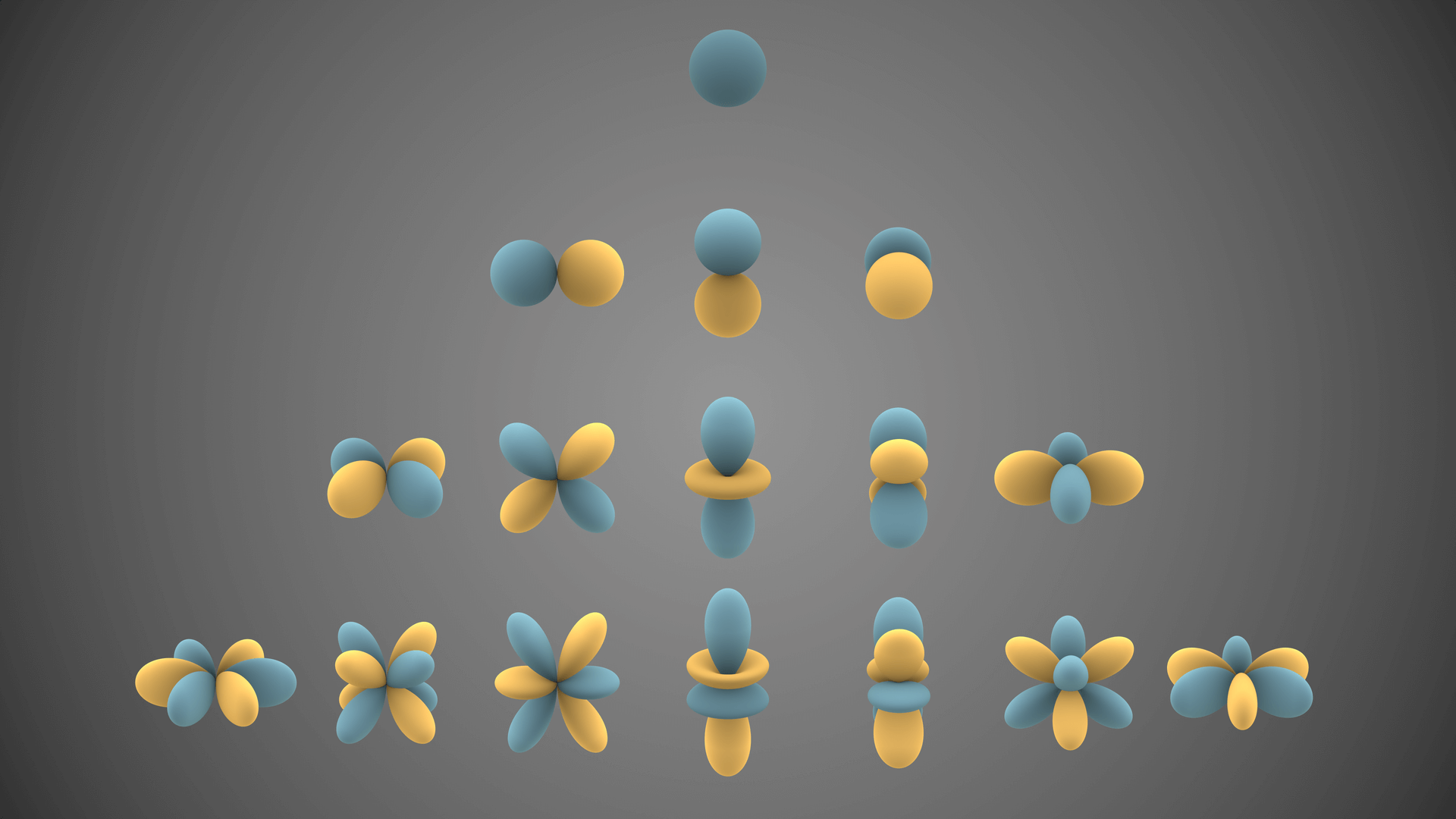
中间的一列函数,即 \(m=0\) 的函数 \(Y_{l}^{0}(\theta,\varphi)\),也被称为 Zonal Harmonics(ZH),它们关于 \(z\) 轴旋转对称。
基函数表¶
之前推导的是复数域的基函数,但在图形学中常用实数域的版本,下面列出的是前 9 个归一化(\(r=1\))的系数。1
| \(l \backslash m\) | \(-2\) | \(-1\) | \(0\) | \(1\) | \(2\) |
|---|---|---|---|---|---|
| \(0\) | \({\dfrac{1}{2}}{\sqrt{\dfrac{1}{\pi}}}\) | ||||
| \(1\) | \({\sqrt{\dfrac{3}{4\pi}}}\cdot y\) | \({\sqrt{\dfrac{3}{4\pi}}}\cdot z\) | \({\sqrt{\dfrac{3}{4\pi}}\cdot x}\) | ||
| \(2\) | \({\dfrac{1}{2}}{\sqrt{\dfrac{15}{\pi}}}\cdot x y\) | \({\dfrac{1}{2}}{\sqrt{\dfrac{15}{\pi}}}\cdot yz\) | \(\dfrac{1}{4}\sqrt{\dfrac{5}{\pi}}\cdot (3z^{2}-1)\) | \({\dfrac{1}{2}}{\sqrt{\dfrac{15}{\pi}}}\cdot xz\) | \(\dfrac{1}{4}\sqrt{\dfrac{15}{\pi}}\cdot (x^{2}-y^{2})\) |
// SH Basis coefs
#define SHBasis0 0.28209479177387814347f // {0, 0} : 1/2 * sqrt(1/Pi)
#define SHBasis1 0.48860251190291992159f // {1, 0} : 1/2 * sqrt(3/Pi)
#define SHBasis2 1.09254843059207907054f // {2,-2} : 1/2 * sqrt(15/Pi)
#define SHBasis3 0.31539156525252000603f // {2, 0} : 1/4 * sqrt(5/Pi)
#define SHBasis4 0.54627421529603953527f // {2, 2} : 1/4 * sqrt(15/Pi)
void GetSH9Basis(float3 N, out float basis[9])
{
basis[0] = SHBasis0;
basis[1] = SHBasis1 * N.y;
basis[2] = SHBasis1 * N.z;
basis[3] = SHBasis1 * N.x;
basis[4] = SHBasis2 * N.x * N.y;
basis[5] = SHBasis2 * N.y * N.z;
basis[6] = SHBasis3 * (3.0 * N.z * N.z - 1.0);
basis[7] = SHBasis2 * N.x * N.z;
basis[8] = SHBasis4 * (N.x * N.x - N.y * N.y);
}
性质¶
下面都讨论实数域球谐基函数 \(Y_{l}^{m}(\theta,\varphi)\) 的性质。
正交归一化¶
其中,\(\delta_{ij}\) 是克罗内克 \(\delta\) 函数(Kronecker delta)。上式就是两个基函数的点乘,当 \(l=l' \wedge m=m'\) 时为 \(1\),其余情况为 \(0\)。这说明基函数是两两正交,且归一化的。
投影¶
卷积¶
如果卷积核函数 \(h(z)\) 关于 \(z\) 轴旋转对称,即球谐系数中只有 \(h_l^0\) 不为 \(0\),则
余弦¶
Ringing¶
参考¶
- Sloan P P. Stupid spherical harmonics (sh) tricks[C]//Game developers conference. 2008, 9: 42.
- Spherical harmonics - Wikipedia
- 球谐光照——球谐函数 - 知乎
- 球谐的振铃效应 - 知乎
- 游戏中的全局光照(一) 球谐函数和环境光漫反射 - 知乎
- Is convolution in spherical harmonics equivalent to multiplication in the spatial domain? - Mathematics Stack Exchange
- Spherical Harmonics